O LICASER, sigla para Little Car Service, foi desenvolvido com a finalidade de ser um hardware capaz de ser usado em aparelhos para transporte de carga de pequeno porte, como: cadeiras de rodas e carros para transportes de cargas em armazéns. O intuito principal do projeto é simplificar processos que são feitos de formas braçais, melhorando a condição de vida ou de trabalho dos usuários.
Este projeto, desenvolvido em grupo, objetiva a obtenção da última nota na disciplina de Introdução à Engenharia da Computação, da Universidade Federal da Paraíba (UFPB).
A imagem abaixo trata-se de um exemplo de modelagem em 3D das principais aplicações do LICASER, sendo elas um Carro para Transporte de Cargas e uma Cadeira de Rodas.

| Item | Preço |
|---|---|
| 1 Arduino UNO R3 | R$ 45,90 |
| 1 Acionador de Motor Ponte H | R$ 25,00 |
| 2 Motores DC | R$ 26,00 |
| 1 Bateria V | R$ 9,00 |
| 1 Sensor Infravermelho | R$ 4,00 |
| 1 Sensor Ultrassônico HC-SR04 | R$ 14,00 |
| 1 Controle Remoto | R$ 6,56 |
| 1 Protoboard 830 furos | R$ 15,00 |
| 27 Jumpers | R$ 9,90 |
| Total | R$ 155,36 |
Abaixo será descrita as etapas da realização do circuito e código do projeto. O circuito foi feito utilizando o simulador de Arduino Tinkercad.
As primeiras conexões realizadas foram a do Arduino com a protoboard, e em seguida foram ligados os motores na Ponte H.
Foram feitos os códigos para acionamento dos motores, que inicialmente era ligados por Monitor Serial.
Após certificar que as funções estavam funcionando corretamente, foi colocado o Sensor Infravermelho e o Controle Remoto, e ajustado o código para receber os valores do controle.
Botão 2 o motor gira para frente;
Botão 4 o motor gira alternadamente fazendo com que vire para a esquerda;
Botão 6 o motor gira alternadamente fazendo com que vire para a direita;
Botao 8 o motor gira para trás;
Botão Power o motor para;
Por fim foi ligado o Sensor Ultrassônico, e atribuido uma função para calcular a distância do LICASER até um obstáculo. Esse sensor fica na parte de trás do LICASER e funciona quando está na função de dar ré. Quando a distância for menor que 30cm, por segurança, o motor desliga.
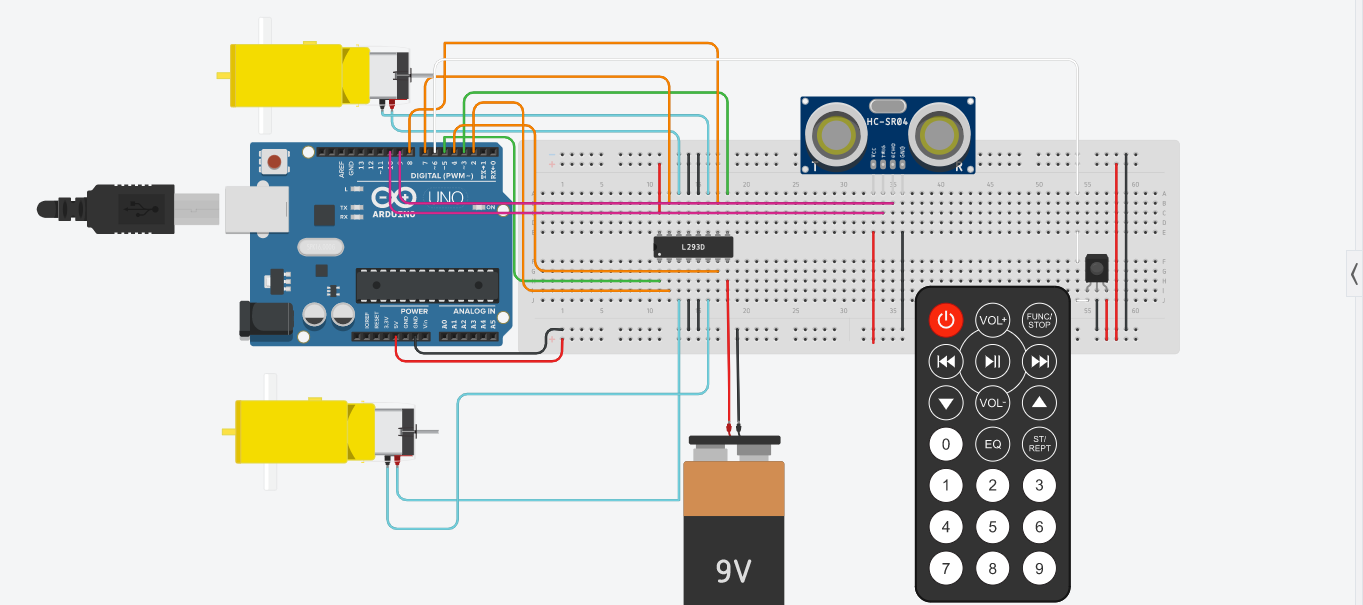
A imagem abaixo mostra a esquematização do circuito feito no Tinkercad.