| comments | difficulty | edit_url | tags | ||||
|---|---|---|---|---|---|---|---|
true |
Easy |
|
There is a bi-directional graph with n vertices, where each vertex is labeled from 0 to n - 1 (inclusive). The edges in the graph are represented as a 2D integer array edges, where each edges[i] = [ui, vi] denotes a bi-directional edge between vertex ui and vertex vi. Every vertex pair is connected by at most one edge, and no vertex has an edge to itself.
You want to determine if there is a valid path that exists from vertex source to vertex destination.
Given edges and the integers n, source, and destination, return true if there is a valid path from source to destination, or false otherwise.
Example 1:
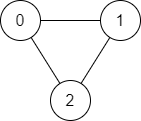
Input: n = 3, edges = [[0,1],[1,2],[2,0]], source = 0, destination = 2 Output: true Explanation: There are two paths from vertex 0 to vertex 2: - 0 → 1 → 2 - 0 → 2
Example 2:
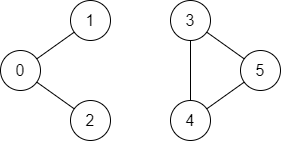
Input: n = 6, edges = [[0,1],[0,2],[3,5],[5,4],[4,3]], source = 0, destination = 5 Output: false Explanation: There is no path from vertex 0 to vertex 5.
Constraints:
1 <= n <= 2 * 1050 <= edges.length <= 2 * 105edges[i].length == 20 <= ui, vi <= n - 1ui != vi0 <= source, destination <= n - 1- There are no duplicate edges.
- There are no self edges.
We first convert
During the process, we use an array
The time complexity is
class Solution:
def validPath(
self, n: int, edges: List[List[int]], source: int, destination: int
) -> bool:
def dfs(i: int) -> bool:
if i == destination:
return True
vis.add(i)
for j in g[i]:
if j not in vis and dfs(j):
return True
return False
g = [[] for _ in range(n)]
for u, v in edges:
g[u].append(v)
g[v].append(u)
vis = set()
return dfs(source)class Solution {
private int destination;
private boolean[] vis;
private List<Integer>[] g;
public boolean validPath(int n, int[][] edges, int source, int destination) {
this.destination = destination;
vis = new boolean[n];
g = new List[n];
Arrays.setAll(g, i -> new ArrayList<>());
for (var e : edges) {
int u = e[0], v = e[1];
g[u].add(v);
g[v].add(u);
}
return dfs(source);
}
private boolean dfs(int i) {
if (i == destination) {
return true;
}
vis[i] = true;
for (var j : g[i]) {
if (!vis[j] && dfs(j)) {
return true;
}
}
return false;
}
}class Solution {
public:
bool validPath(int n, vector<vector<int>>& edges, int source, int destination) {
vector<int> g[n];
vector<bool> vis(n);
for (const auto& e : edges) {
int u = e[0], v = e[1];
g[u].push_back(v);
g[v].push_back(u);
}
function<bool(int)> dfs = [&](int i) -> bool {
if (i == destination) {
return true;
}
vis[i] = true;
for (int j : g[i]) {
if (!vis[j] && dfs(j)) {
return true;
}
}
return false;
};
return dfs(source);
}
};func validPath(n int, edges [][]int, source int, destination int) bool {
vis := make([]bool, n)
g := make([][]int, n)
for _, e := range edges {
u, v := e[0], e[1]
g[u] = append(g[u], v)
g[v] = append(g[v], u)
}
var dfs func(int) bool
dfs = func(i int) bool {
if i == destination {
return true
}
vis[i] = true
for _, j := range g[i] {
if !vis[j] && dfs(j) {
return true
}
}
return false
}
return dfs(source)
}function validPath(n: number, edges: number[][], source: number, destination: number): boolean {
const g: number[][] = Array.from({ length: n }, () => []);
for (const [u, v] of edges) {
g[u].push(v);
g[v].push(u);
}
const vis = new Set<number>();
const dfs = (i: number) => {
if (i === destination) {
return true;
}
if (vis.has(i)) {
return false;
}
vis.add(i);
return g[i].some(dfs);
};
return dfs(source);
}impl Solution {
pub fn valid_path(n: i32, edges: Vec<Vec<i32>>, source: i32, destination: i32) -> bool {
let n = n as usize;
let source = source as usize;
let destination = destination as usize;
let mut g = vec![Vec::new(); n];
let mut vis = vec![false; n];
for e in edges {
let u = e[0] as usize;
let v = e[1] as usize;
g[u].push(v);
g[v].push(u);
}
fn dfs(g: &Vec<Vec<usize>>, vis: &mut Vec<bool>, i: usize, destination: usize) -> bool {
if i == destination {
return true;
}
vis[i] = true;
for &j in &g[i] {
if !vis[j] && dfs(g, vis, j, destination) {
return true;
}
}
false
}
dfs(&g, &mut vis, source, destination)
}
}We can also use BFS to determine whether there is a path from
Specifically, we define a queue
Next, we continuously take vertices
Finally, if the queue is empty, it means there is no path from
The time complexity is
class Solution:
def validPath(
self, n: int, edges: List[List[int]], source: int, destination: int
) -> bool:
g = [[] for _ in range(n)]
for u, v in edges:
g[u].append(v)
g[v].append(u)
q = deque([source])
vis = {source}
while q:
i = q.popleft()
if i == destination:
return True
for j in g[i]:
if j not in vis:
vis.add(j)
q.append(j)
return Falseclass Solution {
public boolean validPath(int n, int[][] edges, int source, int destination) {
List<Integer>[] g = new List[n];
Arrays.setAll(g, k -> new ArrayList<>());
for (var e : edges) {
int u = e[0], v = e[1];
g[u].add(v);
g[v].add(u);
}
Deque<Integer> q = new ArrayDeque<>();
q.offer(source);
boolean[] vis = new boolean[n];
vis[source] = true;
while (!q.isEmpty()) {
int i = q.poll();
if (i == destination) {
return true;
}
for (int j : g[i]) {
if (!vis[j]) {
vis[j] = true;
q.offer(j);
}
}
}
return false;
}
}class Solution {
public:
bool validPath(int n, vector<vector<int>>& edges, int source, int destination) {
vector<vector<int>> g(n);
for (const auto& e : edges) {
int u = e[0], v = e[1];
g[u].push_back(v);
g[v].push_back(u);
}
queue<int> q{{source}};
vector<bool> vis(n);
vis[source] = true;
while (q.size()) {
int i = q.front();
q.pop();
if (i == destination) {
return true;
}
for (int j : g[i]) {
if (!vis[j]) {
vis[j] = true;
q.push(j);
}
}
}
return false;
}
};func validPath(n int, edges [][]int, source int, destination int) bool {
g := make([][]int, n)
for _, e := range edges {
u, v := e[0], e[1]
g[u] = append(g[u], v)
g[v] = append(g[v], u)
}
q := []int{source}
vis := make([]bool, n)
vis[source] = true
for len(q) > 0 {
i := q[0]
q = q[1:]
if i == destination {
return true
}
for _, j := range g[i] {
if !vis[j] {
vis[j] = true
q = append(q, j)
}
}
}
return false
}function validPath(n: number, edges: number[][], source: number, destination: number): boolean {
const g: number[][] = Array.from({ length: n }, () => []);
for (const [u, v] of edges) {
g[u].push(v);
g[v].push(u);
}
const vis = new Set<number>([source]);
const q = [source];
while (q.length) {
const i = q.pop()!;
if (i === destination) {
return true;
}
for (const j of g[i]) {
if (!vis.has(j)) {
vis.add(j);
q.push(j);
}
}
}
return false;
}use std::collections::{HashSet, VecDeque};
impl Solution {
pub fn valid_path(n: i32, edges: Vec<Vec<i32>>, source: i32, destination: i32) -> bool {
let n = n as usize;
let source = source as usize;
let destination = destination as usize;
let mut g = vec![Vec::new(); n];
for edge in edges {
let u = edge[0] as usize;
let v = edge[1] as usize;
g[u].push(v);
g[v].push(u);
}
let mut q = VecDeque::new();
let mut vis = HashSet::new();
q.push_back(source);
vis.insert(source);
while let Some(i) = q.pop_front() {
if i == destination {
return true;
}
for &j in &g[i] {
if !vis.contains(&j) {
vis.insert(j);
q.push_back(j);
}
}
}
false
}
}Union-Find is a tree-like data structure that, as the name suggests, is used to handle some disjoint set merge and query problems. It supports two operations:
- Find: Determine which subset an element belongs to. The time complexity of a single operation is
$O(\alpha(n))$ . - Union: Merge two subsets into one set. The time complexity of a single operation is
$O(\alpha(n))$ .
For this problem, we can use the Union-Find set to merge the edges in edges, and then determine whether source and destination are in the same set.
The time complexity is
class UnionFind:
def __init__(self, n):
self.p = list(range(n))
self.size = [1] * n
def find(self, x):
if self.p[x] != x:
self.p[x] = self.find(self.p[x])
return self.p[x]
def union(self, a, b):
pa, pb = self.find(a), self.find(b)
if pa == pb:
return False
if self.size[pa] > self.size[pb]:
self.p[pb] = pa
self.size[pa] += self.size[pb]
else:
self.p[pa] = pb
self.size[pb] += self.size[pa]
return True
class Solution:
def validPath(
self, n: int, edges: List[List[int]], source: int, destination: int
) -> bool:
uf = UnionFind(n)
for u, v in edges:
uf.union(u, v)
return uf.find(source) == uf.find(destination)class UnionFind {
private int[] p;
private int[] size;
public UnionFind(int n) {
p = new int[n];
size = new int[n];
for (int i = 0; i < n; ++i) {
p[i] = i;
size[i] = 1;
}
}
public int find(int x) {
if (p[x] != x) {
p[x] = find(p[x]);
}
return p[x];
}
public void union(int a, int b) {
int pa = find(a), pb = find(b);
if (pa != pb) {
if (size[pa] > size[pb]) {
p[pb] = pa;
size[pa] += size[pb];
} else {
p[pa] = pb;
size[pb] += size[pa];
}
}
}
}
class Solution {
public boolean validPath(int n, int[][] edges, int source, int destination) {
UnionFind uf = new UnionFind(n);
for (var e : edges) {
uf.union(e[0], e[1]);
}
return uf.find(source) == uf.find(destination);
}
}class UnionFind {
public:
UnionFind(int n) {
p = vector<int>(n);
size = vector<int>(n, 1);
iota(p.begin(), p.end(), 0);
}
void unite(int a, int b) {
int pa = find(a), pb = find(b);
if (pa != pb) {
if (size[pa] > size[pb]) {
p[pb] = pa;
size[pa] += size[pb];
} else {
p[pa] = pb;
size[pb] += size[pa];
}
}
}
int find(int x) {
if (p[x] != x) {
p[x] = find(p[x]);
}
return p[x];
}
private:
vector<int> p, size;
};
class Solution {
public:
bool validPath(int n, vector<vector<int>>& edges, int source, int destination) {
UnionFind uf(n);
for (const auto& e : edges) {
uf.unite(e[0], e[1]);
}
return uf.find(source) == uf.find(destination);
}
};type unionFind struct {
p, size []int
}
func newUnionFind(n int) *unionFind {
p := make([]int, n)
size := make([]int, n)
for i := range p {
p[i] = i
size[i] = 1
}
return &unionFind{p, size}
}
func (uf *unionFind) find(x int) int {
if uf.p[x] != x {
uf.p[x] = uf.find(uf.p[x])
}
return uf.p[x]
}
func (uf *unionFind) union(a, b int) bool {
pa, pb := uf.find(a), uf.find(b)
if pa == pb {
return false
}
if uf.size[pa] > uf.size[pb] {
uf.p[pb] = pa
uf.size[pa] += uf.size[pb]
} else {
uf.p[pa] = pb
uf.size[pb] += uf.size[pa]
}
return true
}
func validPath(n int, edges [][]int, source int, destination int) bool {
uf := newUnionFind(n)
for _, e := range edges {
uf.union(e[0], e[1])
}
return uf.find(source) == uf.find(destination)
}class UnionFind {
p: number[];
size: number[];
constructor(n: number) {
this.p = Array(n)
.fill(0)
.map((_, i) => i);
this.size = Array(n).fill(1);
}
find(x: number): number {
if (this.p[x] !== x) {
this.p[x] = this.find(this.p[x]);
}
return this.p[x];
}
union(a: number, b: number): boolean {
const [pa, pb] = [this.find(a), this.find(b)];
if (pa === pb) {
return false;
}
if (this.size[pa] > this.size[pb]) {
this.p[pb] = pa;
this.size[pa] += this.size[pb];
} else {
this.p[pa] = pb;
this.size[pb] += this.size[pa];
}
return true;
}
}
function validPath(n: number, edges: number[][], source: number, destination: number): boolean {
const uf = new UnionFind(n);
edges.forEach(([u, v]) => uf.union(u, v));
return uf.find(source) === uf.find(destination);
}struct UnionFind {
p: Vec<usize>,
size: Vec<usize>,
}
impl UnionFind {
fn new(n: usize) -> Self {
let p = (0..n).collect();
let size = vec![1; n];
UnionFind { p, size }
}
fn find(&mut self, x: usize) -> usize {
if self.p[x] != x {
self.p[x] = self.find(self.p[x]);
}
self.p[x]
}
fn union(&mut self, a: usize, b: usize) {
let pa = self.find(a);
let pb = self.find(b);
if pa != pb {
if self.size[pa] > self.size[pb] {
self.p[pb] = pa;
self.size[pa] += self.size[pb];
} else {
self.p[pa] = pb;
self.size[pb] += self.size[pa];
}
}
}
}
impl Solution {
pub fn valid_path(n: i32, edges: Vec<Vec<i32>>, source: i32, destination: i32) -> bool {
let n = n as usize;
let mut uf = UnionFind::new(n);
for e in edges {
let u = e[0] as usize;
let v = e[1] as usize;
uf.union(u, v);
}
uf.find(source as usize) == uf.find(destination as usize)
}
}