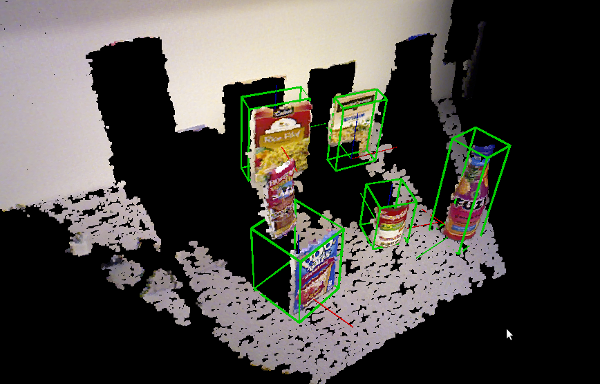
This is a framework for the detection and pose estimation of multiple objects using a monocular camera.
Authors:
Alvaro Collet
Manuel Martinez
Siddhartha Srinivasa
Package maintainer:
David Butterworth
Update Oct 2015:
MOPED has been verified working with ROS Fuerte
on Ubuntu 11.10 Oneiric Ocelot.
You can read the installation guide below.
The packages in this repository are integrated with ROS and were made to be compiled using rosbuild (not catkin).
BundlerPy
imagesender
A node to publish images from a dataset.
meanshiftpy
moped_example
A self-contained program to test MOPED using a sequence of image frames.
moped-modeling-py
moped2
Original MOPED framework using a single, monocular 2D camera.
moped3d
moped_models
Sample object models for use with the example program.
moped_object_pose_publisher
A node to publish Rviz Markers for the detected objects.
pr_msgs
Custom ROS messages and services used by the MOPED framework.
pyublas
See the README files in the moped2 and moped3d packages.
"Lifelong Robotic Object Perception"
Alvaro Collet Romea
Doctoral dissertation, tech. report CMU-RI-TR-12-22, Robotics Institute, Carnegie Mellon University, August, 2012.
Details | PDF (19MB)
"The MOPED framework: Object Recognition and Pose Estimation for Manipulation"
Alvaro Collet Romea, Manuel Martinez Torres, and Siddhartha Srinivasa
International Journal of Robotics Research, Vol. 30, No. 10, pp. 1284 - 1306, September, 2011.
Details | PDF (3MB)
"Efficient Multi-View Object Recognition and Full Pose Estimation"
Alvaro Collet Romea and Siddhartha Srinivasa
2010 IEEE International Conference on Robotics and Automation (ICRA 2010), May, 2010.
Details | PDF (1MB)
"MOPED: A Scalable and Low Latency Object Recognition and Pose Estimation System"
Manuel Martinez Torres, Alvaro Collet Romea, and Siddhartha Srinivasa
Proceedings of ICRA 2010, May, 2010.
Details | PDF (1MB)
"Object Recognition and Full Pose Registration from a Single Image for Robotic Manipulation"
Alvaro Collet Romea, Dmitry Berenson, Siddhartha Srinivasa, and David Ferguson
IEEE International Conference on Robotics and Automation (ICRA 2009), May, 2009.
Details | PDF (1MB)
"Object Recognition Robust to Imperfect Depth Data"
David Fouhey, Alvaro Collet Romea, Martial Hebert , and Siddhartha Srinivasa
2nd Workshop on Consumer Depth Cameras for Computer Vision in conjunction with ECCV 2012, October, 2012.
Details | PDF (3MB)