-
Notifications
You must be signed in to change notification settings - Fork 176
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
1 parent
6f016cf
commit da243bd
Showing
3 changed files
with
41 additions
and
11 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,29 @@ | ||
| # [MPDM2: Multipolicy Decision-Making for Autonomous Driving via Changepoint-based Behavior Prediction](https://www.roboticsproceedings.org/rss11/p43.pdf) | ||
|
|
||
| _June 2024_ | ||
|
|
||
| tl;dr: Improvement of MPDM in predicting the intention of other vehicles. | ||
|
|
||
| #### Overall impression | ||
| The majority is the same as the previous work [MPDM](mpdm.md). | ||
|
|
||
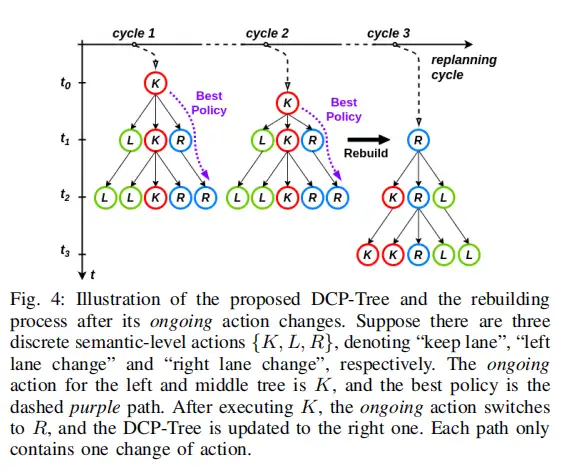
| For the policy tree (or policy-conditioned scenario tree) building, we can see how the tree got built with more and more careful pruning process with improvements from different works. | ||
|
|
||
| * [MPDM](mpdm.md) iterates over all ego policies, and uses the most likely one policy given road structure and pose of vehicle. | ||
| * [MPDM2](mpdm2.md) iterates over all ego policies, and iterate over (a set of) possible policies of other agents predicted by a motion prediction model. | ||
| * [EUDM](eudm.md) itrates all ego policies, and then iterate over all possible policies of other agents to identify **critical scenarios** (CFB, conditioned filtered branching). [EPSILON](epsilon.md) used the same method. | ||
| * [MARC](marc.md) iterates all ego policies, iterates over a set of predicted policies of other agents, identifies **key agents** (and ignores other agents even in critical scenarios). | ||
|
|
||
|
|
||
|  | ||
|
|
||
|
|
||
| #### Key ideas | ||
| - Motion prediction of other agents with a classical ML methods (Maximum likelihood estimation). | ||
|
|
||
| #### Technical details | ||
| - Summary of technical details, such as important training details, or bugs of previous benchmarks. | ||
|
|
||
| #### Notes | ||
| - Questions and notes on how to improve/revise the current work | ||
|
|