

A unique framework that implementes hybrid workloads, seamlessly combining synchronous and asynchronous activities, state machines, routines, the actor model, and supervisors.
It’s perfect for building massive applications and serves as an ideal low-level framework for creating your own frameworks, for example AI-agents. The core idea is to ensure all blocks are highly compatible with each other, enabling significant code reuse.
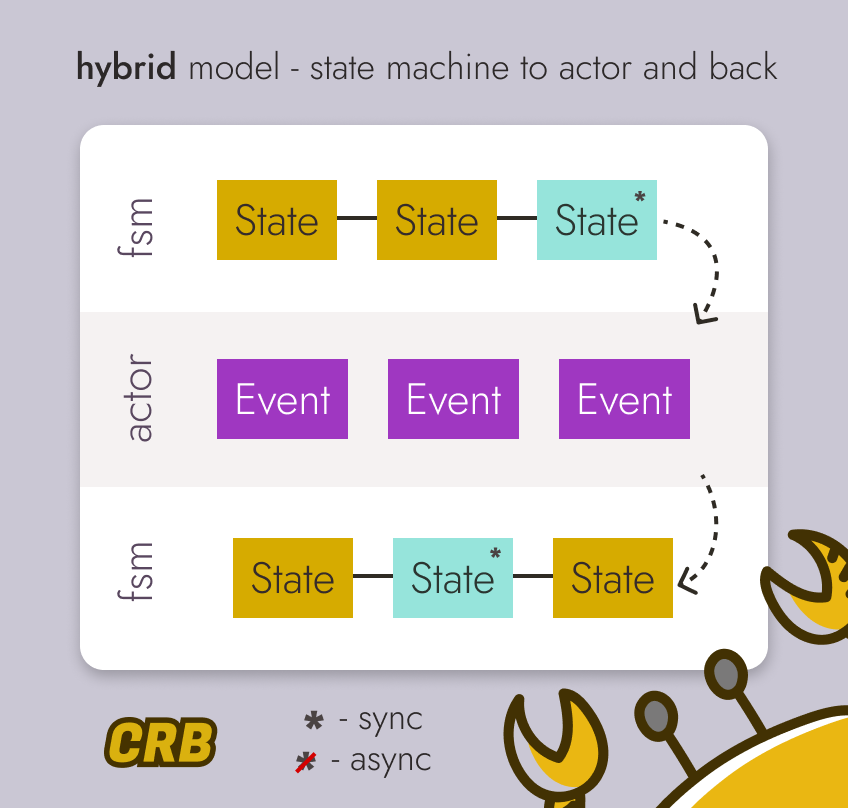
A hybrid workload is a concurrent task capable of switching roles - it can function as a synchronous or asynchronous task, a finite state machine, or as an actor exchanging messages.
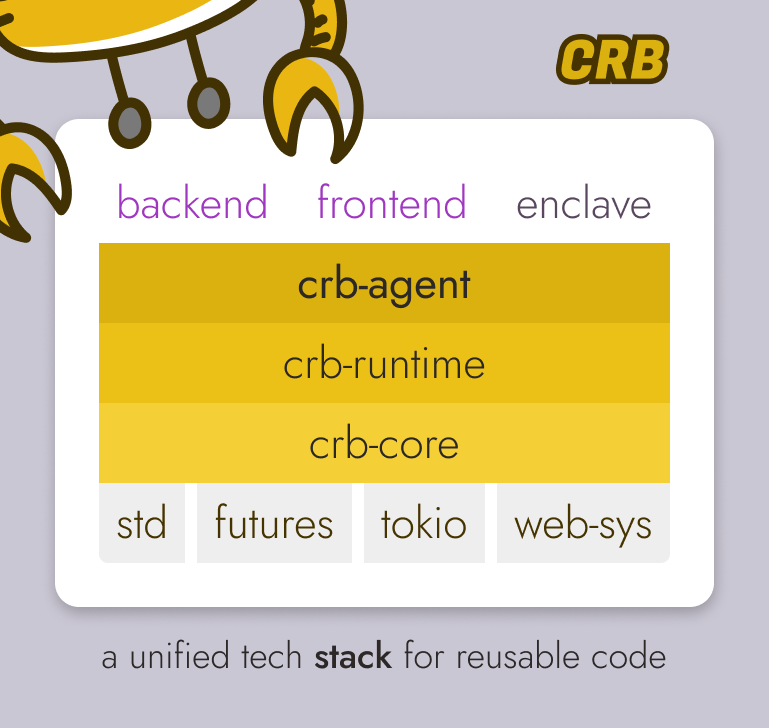
The implementation is designed as a fully portable solution that can run in a standard environment, a WASM virtual machine (e.g., in a browser), or a TEE enclave. This approach significantly reduces development costs by allowing you to reuse code across all parts of your application: backend, frontend, agents, and more.
The key feature is its ability to combine the roles, enabling the implementation of algorithms with complex branching that would be impossible in the flat structure of a standard function. This makes it ideal for building the framework of large-scale applications or implementing complex workflows, such as AI pipelines.
The following projects have been implemented using the framework:
- Ice-Nine - AI agents that work everywhere.
- Crateful - A journal about Rust crates, with information gathered by crab agents.
- Knowledge.Dev - An interactive book for learning practical, idiomatic Rust (product is entirely written in Rust).
Below, you'll find numerous examples of building hybrid activities using the framework. These examples are functional but simplified for clarity:
- Type imports are omitted to keep examples clean and focused.
- The
async_traitmacro is used but not explicitly shown, as exported traits with asynchronous methods are expected in the future. anyhow::Resultis used instead of the standardResultfor simplicity.- Agent context is not specified, as it is always
AgentSessionin these cases. - The output type
Outputis omitted, as it is always()here and may become a default in the future.
The examples demonstrate various combinations of states and modes, but in reality, there are many more possibilities, allowing for any sequence or combination.
To create a universal hybrid activity, you need to define a structure and implement the Agent trait for it. By default, the agent starts in a reactive actor mode, ready to receive messages and interact with other actors.
However, you can override this behavior by explicitly specifying the agent's initial state in the begin() method.
pub struct Task;
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
Next::do_async(()) // The next state
}
}The next state is defined using the Next object, which provides various methods for controlling the state machine. To perform an asynchronous activity, use the do_async() method, passing the new state as a parameter (default is ()).
Then, implement the DoAsync trait for your agent by defining the asynchronous once() method:
impl DoAsync for Task {
async fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
do_something().await?;
Ok(Next::done())
}
}The result should specify the next state of the state machine. If you want to terminate the agent, simply return the termination state by calling the done() method on the Next type.
The simplest example is creating a task that performs an asynchronous activity and then terminates.
pub struct Task;
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
Next::do_async(())
}
}
impl DoAsync for Task {
async fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
reqwest::get("https://www.rust-lang.org").await?.text().await?;
Ok(Next::done())
}
}Unlike standard asynchronous activities, you can implement the fallback() method to modify the course of actions in case of an error:
impl DoAsync for Task {
async fn fallback(&mut self, err: Error) -> Next<Self> {
log::error!("Can't load a page: {err}. Trying again...");
Ok(Next::do_async(()))
}
}The task will now repeatedly enter the same state until the loading process succeeds.
The agent already implements a persistent routine in the repeat() method, which repeatedly attempts to succeed by calling the once() method. To achieve the same effect, we can simply override that method:
impl DoAsync for Task {
async fn repeat(&mut self, _: &mut ()) -> Result<Option<Next<Self>>> {
reqwest::get("https://www.rust-lang.org").await?.text().await?;
Ok(Some(Next::done()))
}
}The repeat() method will continue to run until it returns the next state for the agent to transition to.
To implement a synchronous task simply call the do_sync() method on Next:
pub struct Task;
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
Next::do_sync(())
}
}Next, implement the DoSync trait to run the task in a thread (either the same or a separate one, depending on the platform):
impl DoSync for Task {
fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
let result: u64 = (1u64..=20).map(|x| x.pow(10)).sum();
println!("{result}");
Ok(Next::done())
}
}In the example, it calculates the sum of powers and prints the result to the terminal.
Interestingly, you can define different states and implement unique behavior for each, whether synchronous or asynchronous. This gives you both a state machine and varied execution contexts without the need for manual process management.
Let’s create an agent that prints the content of a webpage to the terminal. The first state the agent should transition to is GetPage, which includes the URL of the page to be loaded. This state will be asynchronous, so call the do_async() method with the Next state.
pub struct Task;
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
let url = "https://www.rust-lang.org".into();
Next::do_async(GetPage { url })
}
}Implement the GetPage state by defining the corresponding structure and using it in the DoAsync trait implementation for our agent Task:
struct GetPage { url: String }
impl DoAsync<GetPage> for Task {
async fn once(&mut self, state: &mut GetPage) -> Result<Next<Self>> {
let text = reqwest::get(state.url).await?.text().await?;
Ok(Next::do_sync(Print { text }))
}
}In the GetPage state, the webpage will be loaded, and its content will be passed to the next state, Print, for printing. Since the next state is synchronous, it is provided as a parameter to the do_sync() method.
Now, let’s define the Print state as a structure and implement the DoSync trait for it:
struct Print { text: String }
impl DoSync<Print> for Task {
fn once(&mut self, state: &mut Print) -> Result<Next<Self>> {
printlnt!("{}", state.text);
Ok(Next::done())
}
}The result is a state machine with the flexibility to direct its workflow into different states, enabling the implementation of a robust and sometimes highly nonlinear algorithm that would be extremely difficult to achieve within a single asynchronous function.
Previously, we didn't modify the data stored in a state. However, states provide a convenient context for managing execution flow or collecting statistics without cluttering the task's main structure!
pub struct Task;
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
Next::do_async(Monitor)
}
}
struct Monitor {
total: u64,
success: u64,
}
impl DoAsync<Monitor> for Task {
async fn repeat(&mut self, mut state: &mut Monitor) -> Result<Option<Next<Self>>> {
state.total += 1;
reqwest::get("https://www.rust-lang.org").await?.error_for_status()?;
state.success += 1;
sleep(Duration::from_secs(10)).await;
Ok(None)
}
}Above is an implementation of a monitor that simply polls a website and counts successful attempts. It does this without modifying the Task structure while maintaining access to it.
Within an asynchronous activity, all standard tools for concurrently executing multiple Futures are available. For example, in the following code, several web pages are requested simultaneously using the join_all() function:
pub struct ConcurrentTask;
impl Agent for ConcurrentTask {
fn begin(&mut self) -> Next<Self> {
Next::do_async(())
}
}
impl DoAsync for ConcurrentTask {
async fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
let urls = vec![
"https://www.rust-lang.org",
"https://www.crates.io",
"https://crateful.substack.com",
"https://knowledge.dev",
];
let futures = urls.into_iter().map(|url| reqwest::get(url));
future::join_all(futures).await
Ok(Next::done())
}
}This approach allows for more efficient utilization of the asynchronous runtime while maintaining the workflow without needing to synchronize the retrieval of multiple results.
Another option is parallelizing computations. This is easily achieved by implementing a synchronous state. Since it runs in a separate thread, it doesn't block the asynchronous runtime, allowing other agents to continue executing in parallel.
pub struct ParallelTask;
impl Agent for ParallelTask {
fn begin(&mut self) -> Next<Self> {
Next::do_sync(())
}
}
impl DoSync for ParallelTask {
fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
let numbers = vec![1, 2, 3, 4, 5, 6, 7, 8, 9, 10];
let squares = numbers.into_par_iter().map(|n| n * n).collect();
Ok(Next::done())
}
}In the example above, parallel computations are performed using the rayon crate. The results are awaited asynchronously by the agent since DoSync shifts execution to a thread while continuing to wait for the result asynchronously.
The framework allows tasks to be reused within other tasks, offering great flexibility in structuring code.
pub struct RunBoth;
impl Agent for RunBoth {
fn begin(&mut self) -> Next<Self> {
Next::do_async(())
}
}
impl DoAsync for RunBoth {
async fn once(&mut self, _: &mut ()) -> Result<Next<Self>> {
join!(
ConcurrentTask.run(),
ParallelTask.run(),
).await;
Ok(Next::done())
}
}The code example implementes an agent that waits for the simultaneous completion of two tasks we implemented earlier: concurrent and parallel.
Although the states within a group inherently form a state machine, you can define it more explicitly by adding a field to the agent and describing the states with a dedicated enum:
enum State {
First,
Second,
Third,
}
struct Task {
state: State,
}In this case, the State enumeration can handle transitions between states. Transition rules can be implemented as a function that returns a Next instance with the appropriate state handler.
impl State {
fn next(&self) -> Next<Task> {
match self {
State::First => Next::do_async(First),
State::Second => Next::do_async(Second),
State::Third => Next::do_async(Third),
}
}
}Set the initial state when creating the task (it can even be set in the constructor), and delegate state transitions to the next() function, called from the begin() method.
impl Agent for Task {
fn begin(&mut self) -> Next<Self> {
self.state.next()
}
}Implement all state handlers, with the State field determining the transition to the appropriate handler. Simply use its next() method so that whenever the state changes, the transition always leads to the correct handler.
struct First;
impl DoAsync<First> for Task {
async fn once(&mut self, _: &mut First) -> Result<Next<Self>> {
self.state = State::Second;
Ok(self.state.next())
}
}
struct Second;
impl DoAsync<Second> for Task {
async fn once(&mut self, _: &mut Second) -> Result<Next<Self>> {
self.state = State::Third;
Ok(self.state.next())
}
}
struct Third;
impl DoAsync<Third> for Task {
async fn once(&mut self, _: &mut Third) -> Result<Next<Self>> {
Ok(Next::done())
}
}💡 The framework is so flexible that it allows you to make this logic even more explicit by implementing a custom Performer for the agent.
Agents handle messages asynchronously. Actor behavior is enabled by default if no transition state is specified in the begin() method. Alternatively, you can switch to this mode from any state by calling Next::events(), which starts message processing.
In other words, the actor state is the default for the agent, so simply implementing the Agent trait is enough:
struct Actor;
impl Agent for Actor {}An actor can accept any data type as a message, as long as it implements the OnEvent trait for that type and its handle() method. For example, let's teach our actor to accept an AddUrl message, which adds an external resource:
struct AddUrl { url: Url }
impl OnEvent<AddUrl> for Actor {
async handle(&mut self, event: AddUrl, ctx: &mut Self::Context) -> Result<()> {
todo!()
}
}Actors can implement handlers for any number of messages, allowing you to add as many OnEvent implementations as needed:
struct DeleteUrl { url: Url }
impl OnEvent<DeleteUrl> for Actor {
async handle(&mut self, event: DeleteUrl, ctx: &mut Self::Context) -> Result<()> {
todo!()
}
}The provided context (ctx) allows you to send a message, terminate the actor, or transition to a new state by setting the next state with Next.
State transitions have the highest priority. Even if there are messages in the queue, the state transition will occur first, and messages will wait until the agent returns to the actor state.
The actor model is designed to let you add custom handler traits for any type of event. For example, this framework supports interactive actor interactions—special messages that include a request and a channel for sending a response.
The example below implements a server that reserves an Id in response to an interactive request and returns it:
struct Server {
slab: Slab<Record>,
}
struct GetId;
impl Request for GetId {
type Response = usize;
}
impl OnRequest<GetId> for Server {
async on_request(&mut self, _: GetId, ctx: &mut Self::Context) -> Result<usize> {
let record = Record { ... };
Ok(self.slab.insert(record))
}
}The request must implement the Request trait to specify the Response type. As you may have noticed, for the OnRequest trait, we implemented the on_request() method, which expects a response as the result. This eliminates the need to send it manually.
The following code implements a Client that configures itself by sending a request to the server to obtain an Id and waits for a response by implementing the OnResponse trait.
struct Client {
server: Address<Server>,
}
impl Agent for Client {
fn begin(&mut self) -> Next<Self> {
Next::in_context(Configure)
}
}
struct Configure;
impl InContext<Configure> for Client {
async fn once(&mut self, _: &mut Configure, ctx: &mut Self::Context) -> Result<Next<Self>> {
self.server.request(GetId)?.forward_to(ctx)?;
Ok(Next::events())
}
}
impl OnResponse<GetId> for Client {
async on_response(&mut self, id: usize, ctx: &mut Self::Context) -> Result<()> {
println!("Reserved id: {id}");
Ok(())
}
}An actor (or any agent) can be launched from anywhere if it implements the Standalone trait. Otherwise, it can only be started within the context of a supervisor.
The supervisor can also manage all spawned tasks and terminate them in a specific order by implementing the Supervisor trait:
struct App;
impl Agent for App {
type Context = SupervisorSession<Self>;
}
impl Supervior for App {
type Group = Group;
}The Group type defines a grouping for tasks, where the order of its values determines the sequence in which child agents (tasks, actors) are terminated.
#[derive(Clone, PartialEq, Eq, PartialOrd, Ord, Hash)]
enum Group {
Workers,
Requests,
Server,
HealthCheck,
DbCleaner,
UserSession(Uid),
}The framework includes an experimental implementation of pipelines that automatically trigger tasks as they process input data from the previous stage.
However, creating complex workflows is also possible using just the agent's core implementation.
todo
One of the library's major advantages is its out-of-the-box compatibility with WebAssembly (WASM). This allows you to write full-stack solutions in Rust while reusing the same codebase across different environments.
Synchronous tasks are currently unavailable in WASM due to its lack of full thread support. However, using them in environments like browsers is generally unnecessary, as they block asynchronous operations.
The library includes a complete implementation of the actor model, enabling you to build a hierarchy of actors and facilitate message passing between them. When the application stops, actors gracefully shut down between messages processing phases, and in the specified order.
The framework supports not only asynchronous activities (IO-bound) but also allows running synchronous (CPU-bound) tasks using threads. The results of these tasks can seamlessly be consumed by asynchronous activities.
The library offers a Pipeline implementation compatible with actors, routines, and tasks (including synchronous ones), making it ideal for building AI processing workflows.
Unlike many actor frameworks, this library relies heavily on traits. For example, tasks like interactive communication, message handling, or Stream processing are implemented through specific trait implementations.
More importantly, the library is designed to be extensible, allowing you to define your own traits for various needs while keeping your code modular and elegant. For instance, actor interruption is implemented on top of this model.
Trait methods are designed and implemented so that you only need to define specific methods to achieve the desired behavior.
Alternatively, you can fully override the behavior and method call order - for instance, customizing an actor’s behavior in any way you like or adding your own intermediate phases and methods.
The library provides built-in error handling features, such as managing failures during message processing, making it easier to write robust and resilient applications.
The project was originally created by @therustmonk as a result of extensive experimental research into implementing a hybrid actor model in Rust.
To support the project, please subscribe to Crateful, my newsletter about Rust crates, which gathers information using a cast of crab agents written in this framework.
This project is licensed under the MIT license.